




HT500视觉寻迹展示视频http://player.youku.com/embed/XNDE4ODczNTcyNA
产品相关行业背景
无人机电力巡线
我国目前已形成华北、东北、华东、华中、西北和南方电网共6个跨省区电网,110kv以上输电线路已达到近51.4万公里。输电设备在国家电网建设上比重越来越大,随着电网的日益扩大,巡线的工作量也日益加大,传统的巡线方式已经满足不了现代电力系统的广泛需求。无人机巡线方式逐渐被更多人采用。
传统巡线方式巡线距离长、工作量大、步行巡线效率低、容易受到天气影响、山区巡线具有高风险性;无人机巡线携带方便、操作简单、反应迅速、起飞降落对环境要求低、自主飞行;巡线效率高;可提高巡线作业人员的安全性;巡线速度快、及时发现缺陷;
无人机石油管线巡线
石油的运输是当今石油经济中的一个重要环节,管道安全运输则是这一环节中的重点,如何保证整个管道的畅通、安全显得尤为重要。传统的人工巡线方法不仅工作量大而且条件艰苦,特别是对山区、河流、沼泽以及无人区等地的石油管道的巡检;或是在冰灾、水灾、地震、滑坡、夜晚期间巡线检查,所花时间长、人力成本高、困难大。此外,有一些巡检项目靠常规方法还难以完成。
无人机具有成本低廉、方便运输、操作简便以及维护简单等特点,这些特点使得无人机很适合对石油管道的监测和维护。管道巡线无人机系统的投入使用,不仅可以省去耗时耗力的人工监测,而且巡线速度快,信息反馈及时,保证了及早发现问题及早修复,这样可以将损失减到低。
产品简介
中航恒拓HT500XJ视觉寻迹无人机开发平台,在原有飞行平台基础上进行升级优化,采用更加稳固的金属折叠结构,更完善的程序,外加全新设计的机器视觉模块、两轴图像增稳云台、超声波测距传感器以及光流测速传感器,让整个平台的可玩性更强,稳定性更强。可以适用于更多的使用场景。
中航恒拓HT500XJ视觉寻迹无人机开发平台配套组装、焊接工具、实训手册等,学生通过对无人机的拆装调试,可以提高学习兴趣。同时又能练习飞行技能,在学习研发方面也会有所帮助。中航恒拓HT500XJ为开源平台,支持二次开发,同时预留更多的开发接口,支持参加无人机相关竞赛,如中国工程机器人大赛,全国大学生电子设计大赛等。

产品描述
中航恒拓HT500XJ智能视觉寻迹无人机开发平台,采用基于STM32F4的Enzo 2飞控系统,采用500mm对角轴距四旋翼结构,通过搭载的机器视觉模块、光流测速传感器以及超声波测距传感器可以获取地面上的道路信息和高度信息,识别并跟踪地面上的黑线轨道。一键起飞、精准寻迹、悬停、转弯、精准降落全程均可自主完成。同时支持用户手动遥控操作飞行,可拓展完成飞行避障、目标物抓取与投掷、航拍等任务。


HT500XJ采用Keil MDK开发环境和C语言编程,开放源代码和通信协议,入门简单,程序通俗易懂。用户可在此基础上进行二次开发,实现更多功能,提供Windows平台地面站软件平台,通过地面站可获取当前无人机姿态、高度、位置等信息,并可完成一键起飞等功能。
各模块功能介绍
- 飞控系统:负责各个传感器数据的采集与处理,姿态解算、电机转速控制和高度控制等;
- 机器视觉模块:图像采集模块将采集到的黑线位置、宽度等信息通过串口通信发送至飞控从而完成循迹功能;
- 光流测速模块:输出X/Y轴的位移速度,经过飞控算法处理实现稳定无人机的效果;
- 超声波测距模块:超声波模块辅助气压计实现无人机定高功能;
- 两轴增稳云台:稳定图像采集,保证图像质量;
- 数传模块:飞控通过数传模块与地面站进行通信;
- 地面站:地面站可以接收飞控当前的状态数据,如姿态、寻迹阶段等,同时地面站也可以通过发送命令控制无人机一键起飞等;
- 遥控器:控制无人机基本飞行和应急处理。
飞行模式介绍
本寻迹无人机分为自稳模式、定高模式和寻迹模式,可通过遥控器第5通道(CH5)进行模式切换:
- 自稳模式:自稳模式即为遥控器直接控制飞行,该模式下飞手需要通过遥控器控制无人机飞行,自稳模式是最常用的飞行模式,也是最基本的飞行模式。此模式下,飞控会让无人机姿态基本保持稳定,注意此模式下没有定高和自主悬停的功能;
- 定高模式:定高模式下飞控会根据气压计和超声波传感器的数据使飞机保持当前高度。在初次试飞之后就可以尝试定高模式。定高模式下,飞行器依然会横向漂移,可以通过遥控器来移动或保持位置。定高模式下可以用遥控器控制油门来调整高度。
- 寻迹模式:此模式基于定高模式下完成自主起飞、寻迹、转弯、降落等任务;自动模式下,油门通道失效,但偏航、横滚、俯仰通道依然有效。
注意:当由寻迹模式或定高模式切换到自稳模式时,油门位置建议处于中位,注意油门位置,如果油门位置过低,无人机会迅速降落,油门位置过高,会无人机会迅速升高。
产品特性

中航恒拓HT500XJ视觉寻迹无人机开发平台具备的功能特性如下:
无人机放置在虚线轨迹的某一处正上方,图纸如上图所示,操作手操控遥控器 “一键起飞”按钮,无人机自主起飞到1M高度,匀速围绕“ 8”字飞行。飞行全程由无人机自主控制完成,无需操作手干预。
配套资源
- 多旋翼飞行器的基本工作原理
- 多旋翼飞行器的结构形式
- 多旋翼飞行器的工作原理
- 多旋翼飞行器的数学模型
- 姿态控制的原理
- 多旋翼飞行器结构
- Enzo 2飞行控制器概述
- Enzo 2硬件概述
- Enzo 2硬件规格
- Enzo 2基本参数和飞行特征
- Enzo 2接口布局
- 电动机
- 电子调速器
- 螺旋桨
- 电池
- 机架
- 遥控器和接收机
- GPS
- 通信设备
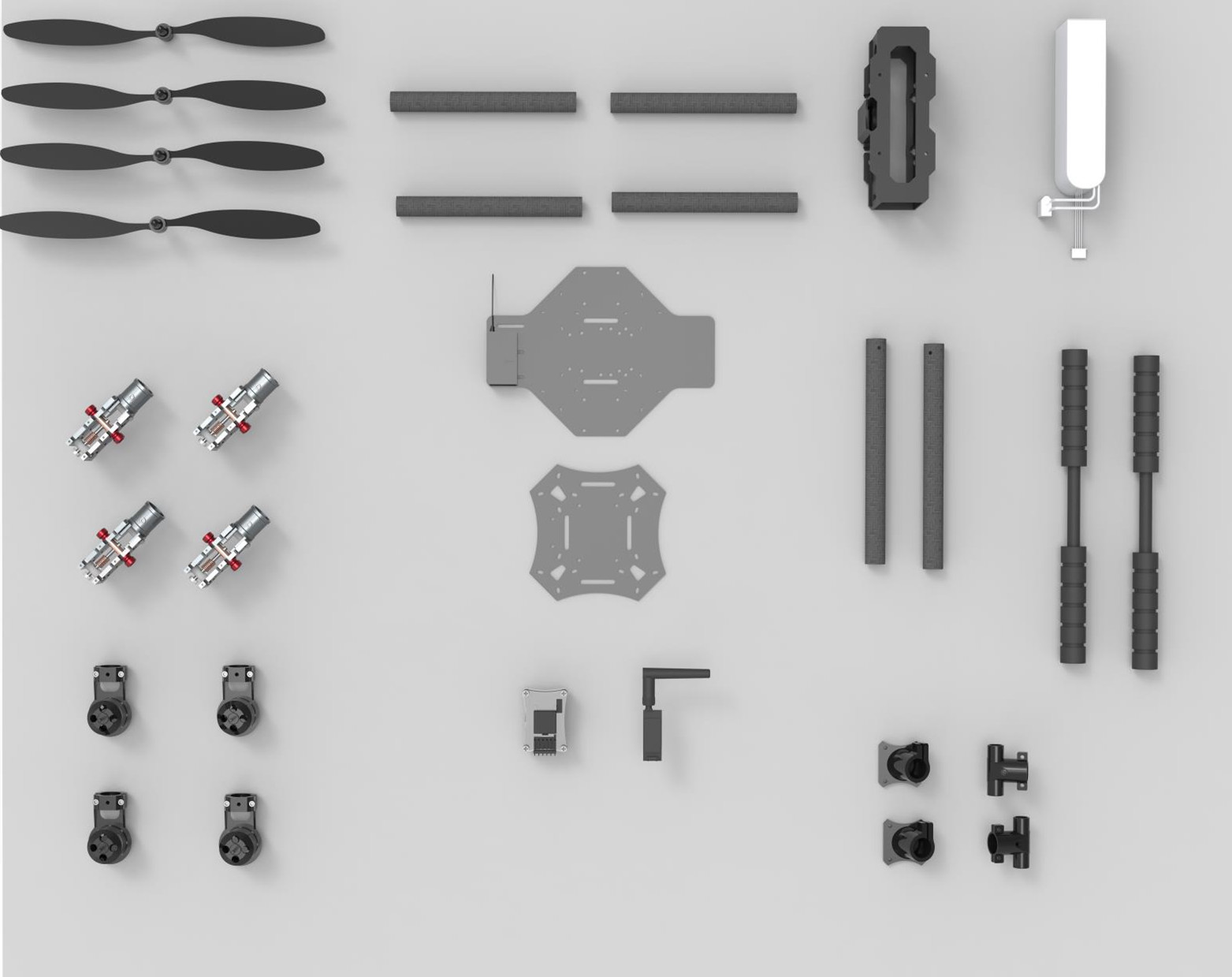
- 多旋翼飞行器组装
- 安装机架
- 安装电机
- 安装电子调速器
- 安装飞行控制器
- 安装接收机
- 固定电池
- 安装螺旋桨
- 基于STM32 的基础程序开发
- 开发环境简介
- 使用 Keil 5 的注意事项
- 选择仿真器的型号
- 选择目标版
- 下载程序
- Bootloader
- 单色及三色LED显示
- USB虚拟串口的使用
- 读取 MPU6050的数据
- 读取 HMC5883L罗盘数据
- MS5611气压数据读取
- PWM 采集
- PWM 输出
- ESP8266 Wi-Fi使用
- Micro SD 卡读写
- A/D 电压采集
- 超声波数据采集和测距
- GPS 数据采集
- 无线串口使用
- 高级飞行算法的设计与实现
- 姿态解算算法概述
- 旋转矩阵
- 方向余弦矩阵
- DCM 与旋转矩阵的联系
- DCM 与欧拉角的关系
- 四元数
- 四元数的定义及计算
- 四元数与方向余弦矩阵
- IMUupdata 算法解析
- IMU 姿态解算
- 串级 PID 算法
- 飞行程序